前言
本本次项目采用的是STM32作为MCU。四足机器人的支架为3D打印件,SG90舵机驱动机器人实现姿态运动。借助PCA9685舵机驱动板实现12路PWM波控制,更多的舵机可以实现机器人更多运动姿态。本文将以STM32作为核心控制板搭配JDY-31蓝牙模块制作一个远程可控的蓝牙四足机器人,采用三角法去解析机器人的步态运动,实现较高自由度的平稳运动。
实验硬件
STM32F103C8T6;PCA9685舵机驱动板;SG90舵机;JDY-31蓝牙模块;0.96寸OLED;四足机器人3D打印件
硬件实物图
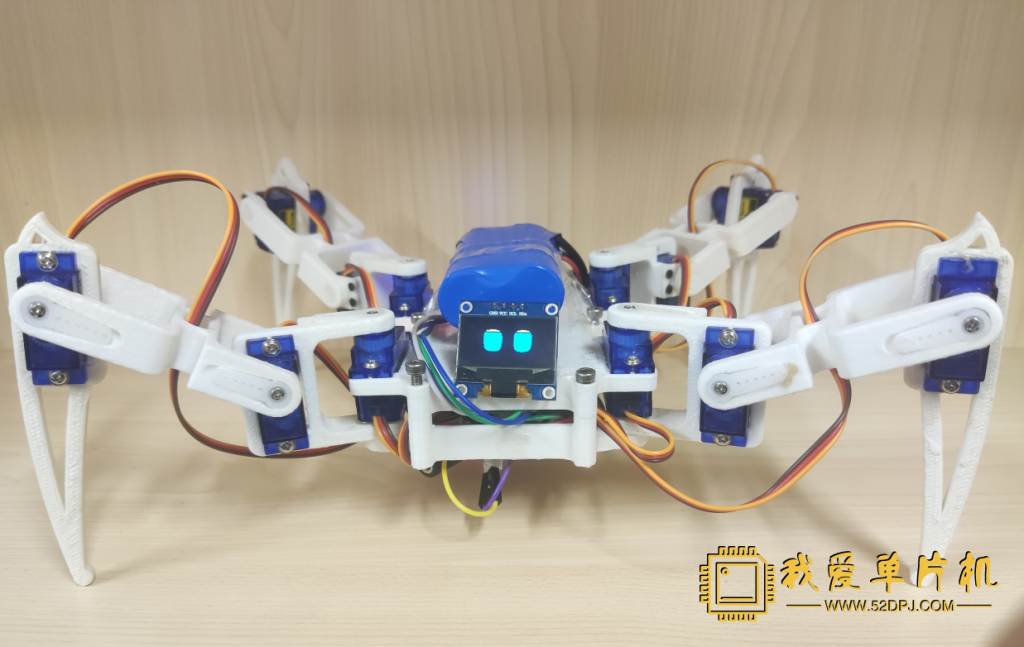


效果图

引脚连接
PCA9685驱动板引脚:
VCC –> 5V
GND –> GND
SCL –> PB6
SDA –> PB7
JDY-31蓝牙模块引脚:
VCC –> 3.3V
GND –> GND
RX–> PA9
TX –> PA10
0.96寸OLED引脚:
VCC –> 3.3V
GND –> GND
SCL –> PB10
SDA –> PB11
链接:https://pan.baidu.com/s/1qV2svZdsAIt6j2sBhxpSyg?pwd=jv2d 提取码:jv2d

© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END